고정밀 지도방식(HD Map)
HD Map 방식 자율주행의 원리와 장점: MMS 차량 데이터 수집부터 정밀 맵핑, 도로와 주변 환경의 3D 재현, 안전성과 주행 안정성 향상까지 살펴봅니다.
최근 여러 기업들의 자율주행에 대한 관심이 높아지고 있다. 나도 자율주행에 관심을 가지게 되었는데, 자율주행 방법도 여러가지 방법이 있다는 것을 알게되어 찾아본 내용을 글로 정리해놓으려 한다.
먼저 여러 자율주행 방식에 대해서 알아보자
자율주행은 고정밀 지도방식(HD Map), 컴퓨터 비전 방식, 센서 퓨전 방식등 여러 기법이 있다. 오늘은 위 3가지 중 HD Map방식의 자율주행 기법을 소개해보려한다. 나머지 2개는 추후 글로 작성해 보겠다.
고정밀 지도 방식(HD Map)
HD Map은 기존 SD맵(내비게이션용으로 사용되는 지도수준으로 도로나 차선, 건물 정보등을 간략히 표현)과 다르게 자율주행을 위해 구축된 무척 정밀한 지도이다. 오차범위가 10cm이내로 매우 세밀하게 도로, 주변 지형정보를 기록한다.
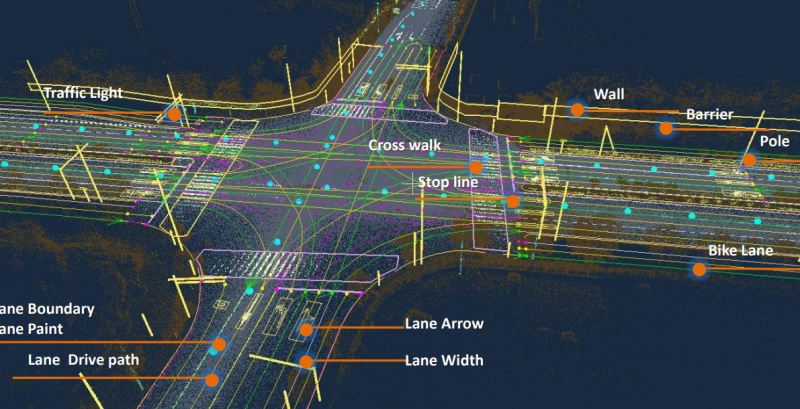
HD맵은 차선 폭, 중앙분리대, 횡단보도, 노면의 표시, 주변 건물의 외곽선등 실제 환경을 거의 그대로 3D로 재현한다.
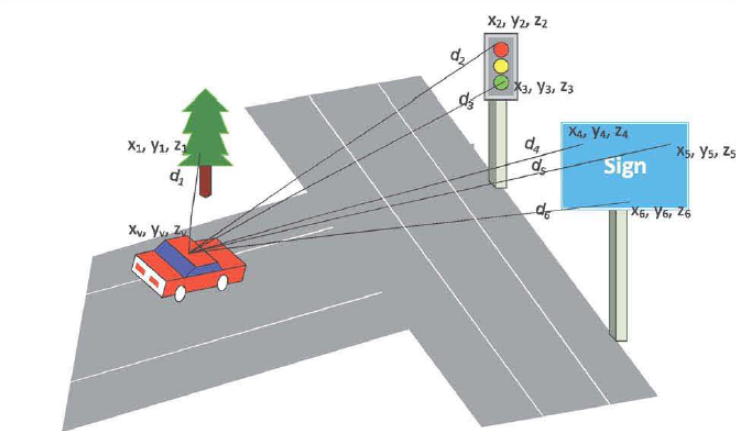
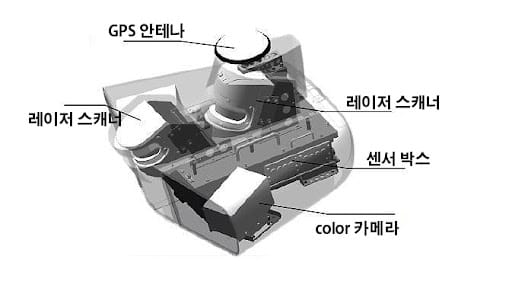
HD맵을 제작하려면 먼저 MMS(Mobile Mapping System)차량을 통해 3D데이터를 수집해야한다. MMS차량은 카메라, 라이다, 레이더, GPS등을 장착하여 주행하면서 도로와 주변 환경의 3D데이터를 수집하는 역할을 한다.

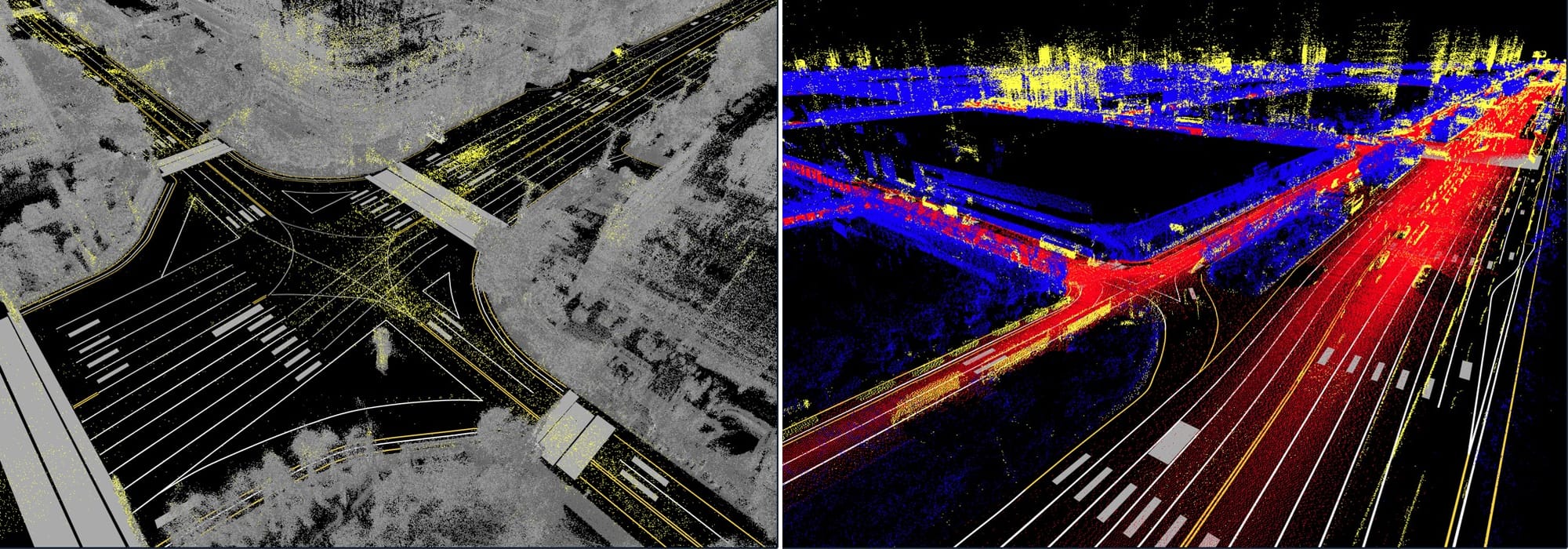
막대한 양의 데이터가 수집되었다면 이 데이터들을 '흑백 레이저 영상'등의 통일된 형태로 가공하는 과정을 거친다.
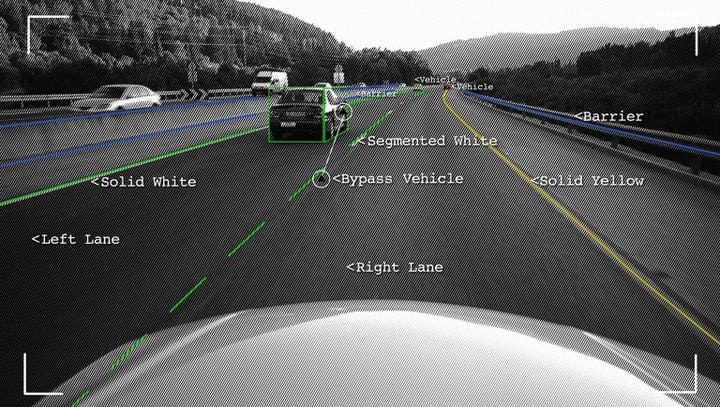
그리고는 차선 정보, 도로 표지판, 건물 윤곽, 노면 정보등 중요한 객체를 식별하고 추출하게되며.
마지막으로는 도로, 보도블럭, 시설물등 핵심 객체를 분류하고 좌표화하여 HD Map의 각 요소들을 구조화하게 된다.
이러한 점들 때문에 HD Map이 가지는 특징적인 장점들이 존재한다.
먼저 HD Map은 정밀한 자율주행을 지원한다. 도로 및 주변 환경을 세밀하게 제공하기 때문에 자율주행 차량이 더욱 안전하고 정확하게 주행할 수 있으며, 차선유지 차선 변경, 정지선 감지등 자율주행의 핵심 기능이 더욱 더 세밀하게 수행가능하다. 또한 주행자체의 안정성이 향상된다.
HD map이 도로 상황에 대한 상세 정보를 제공하기 때문에 돌발 상황에 대응하기 쉽고, 사고 위험이 줄어드며, GPS 신호가 불안정한 도심 환경에서도 HD Map을 활용한 로컬라이제이션으로 차체의 정확한 위치 유지가 가능해진다.
그리고 외부 영향에 대한 보완도 해줄 수 있다. 비, 눈, 안개 등으로 인해 센서가 외부 환경을 정확히 인식하지 못할 때도, HD Map 데이터를 통해 주행에 필요한 도로 정보를 보완할 수 있다.
주행 상황 뿐만 아니라 자율주행 알고리즘을 학습핳는데도 도움을 줄 수있다. HD Map 데이터를 가지고 차량 시트템의 자율주행 모델 학습에 사용할 수 있다.
이런 HD Map같은경우는 단점도 꽤 존재한다.
첫 번째로는 각종 센서를 탑재한 MMS차량 자체가 무척 비용이 높다는 점이다.

그리고 HD Map은 넓은 지역을 세밀하게 맴핑해야 하므로, 인력이나 장비, 시간이 매우 많이 소모된다.(비용이 비싸다는 말이다.) 현재 미국의 웨이모도 일부지역(캘리포니아)만 운행하는 이유이다.
마지막으로는 자율주행 지역을 사전에 정밀 맴핑해야 하므로, 예기치 않은 새로운 도로나 공간에 즉각 대응하기 어려울 뿐더러 지속적인 업데이트가 필요해, 실시간 혹은 주기적인 후처리 공정이 필수적으로 포함된다.
하지만 HD Map은 여러 센서들과 합쳐져서 좋은 시너지 효과를 만들 수 있다고 생각된다. 또한 자율주행 이외에도 HD Map을 활용할 방법이 많이 때문에 점차 HD Map 생성은 확대되어 나갈 것 이다.
